|
|
@@ -1,92 +1,2 @@
|
|
|
-from pysketcher import *
|
|
|
-
|
|
|
-H = 7.
|
|
|
-W = 6.
|
|
|
-
|
|
|
-drawing_tool.set_coordinate_system(xmin=0, xmax=W,
|
|
|
- ymin=0, ymax=H,
|
|
|
- axis=False)
|
|
|
-drawing_tool.set_linecolor('blue')
|
|
|
-#drawing_tool.set_grid(True)
|
|
|
-
|
|
|
-def set_dashed_thin_blackline(*objects):
|
|
|
- """Set linestyle of an object to dashed, black, width=1."""
|
|
|
- for obj in objects:
|
|
|
- obj.set_linestyle('dashed')
|
|
|
- obj.set_linecolor('black')
|
|
|
- obj.set_linewidth(1)
|
|
|
-
|
|
|
-
|
|
|
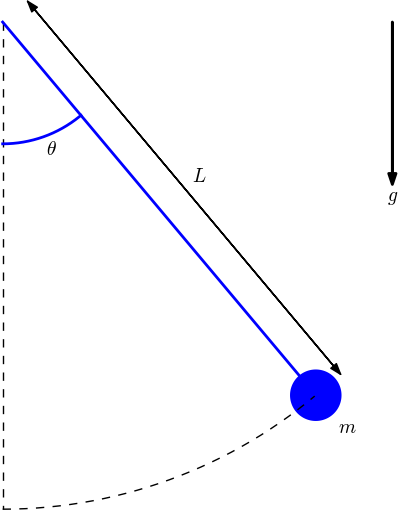
-L = 5*H/7 # length
|
|
|
-P = (W/6, 0.85*H) # rotation point
|
|
|
-a = 40 # angle
|
|
|
-
|
|
|
-path = Arc(P, L, -90, a)
|
|
|
-angle = Arc_wText(r'$\theta$', P, L/4, -90, a, text_spacing=1/30.)
|
|
|
-vertical = Line(P, P-point(0,L))
|
|
|
-
|
|
|
-rod = Line(P, P + L*point(sin(radians(a)), -L*cos(radians(a))))
|
|
|
-# or shorter (and more reliable)
|
|
|
-mass_pt = path.geometric_features()['end']
|
|
|
-rod = Line(P, mass_pt)
|
|
|
-
|
|
|
-mass = Circle(center=mass_pt, radius=L/20.)
|
|
|
-mass.set_filled_curves(color='blue')
|
|
|
-rod_vec = rod.geometric_features()['end'] - rod.geometric_features()['start']
|
|
|
-mass_symbol = Text('$m$', mass_pt + L/10*unit_vec(rod_vec))
|
|
|
-
|
|
|
-length = Distance_wText(P, mass_pt, '$L$')
|
|
|
-# Displace length indication
|
|
|
-length.translate(L/15*point(cos(radians(a)), sin(radians(a))))
|
|
|
-gravity = Gravity(start=P+point(0.8*L,0), length=L/3)
|
|
|
-
|
|
|
-set_dashed_thin_blackline(vertical, path)
|
|
|
-
|
|
|
-dims = Composition(
|
|
|
- {'vertical': vertical, 'theta': angle, 'path': path,
|
|
|
- 'g': gravity, 'L': length, 'm': mass_symbol})
|
|
|
-
|
|
|
-fig = Composition({'body': mass, 'rod': rod, 'dims': dims})
|
|
|
-
|
|
|
-#drawing_tool.ax.set_xlim(4,10)
|
|
|
-#drawing_tool.ax.set_ylim(1,8)
|
|
|
-fig.draw()
|
|
|
-drawing_tool.display()
|
|
|
-drawing_tool.savefig('tmp_pendulum1')
|
|
|
-
|
|
|
-# Draw body diagram
|
|
|
-raw_input('Press Return to make body diagram: ')
|
|
|
-#import time; time.sleep(3)
|
|
|
-drawing_tool.erase()
|
|
|
-
|
|
|
-drawing_tool.set_linecolor('black')
|
|
|
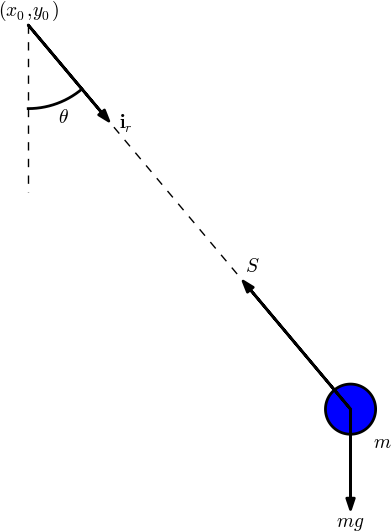
-mg_force = Force(mass_pt, mass_pt + L/5*point(0,-1), '$mg$', text_pos='end')
|
|
|
-rod_force = Force(mass_pt, mass_pt - L/3*unit_vec(rod_vec),
|
|
|
- '$S$', text_pos='end')
|
|
|
-
|
|
|
-rod_start = rod.geometric_features()['start']
|
|
|
-vertical2 = Line(rod_start, rod_start + point(0,-L/3))
|
|
|
-set_dashed_thin_blackline(vertical2)
|
|
|
-set_dashed_thin_blackline(rod)
|
|
|
-angle2 = Arc_wText(r'$\theta$', rod_start, L/6, -90, a, text_spacing=1/30.)
|
|
|
-
|
|
|
-# Cannot understand this one:
|
|
|
-#path2 = Arc(P, L, -90+a-a/2., a)
|
|
|
-#path2.set_arrow('<-')
|
|
|
-#path2.set_linestyle('dashed')
|
|
|
-
|
|
|
-body_diagram = Composition(
|
|
|
- {'mg': mg_force, 'S': rod_force, 'rod': rod,
|
|
|
- 'vertical': vertical2, 'theta': angle2,
|
|
|
- #'path': path2,
|
|
|
- 'body': mass, 'm': mass_symbol})
|
|
|
-
|
|
|
-body_diagram.draw()
|
|
|
-drawing_tool.display('Body diagram')
|
|
|
-drawing_tool.savefig('tmp_pendulum2')
|
|
|
-
|
|
|
-drawing_tool.adjust_coordinate_system(body_diagram.minmax_coordinates(), 90)
|
|
|
-drawing_tool.display('Body diagram')
|
|
|
-drawing_tool.savefig('tmp_pendulum3')
|
|
|
-
|
|
|
-raw_input()
|
|
|
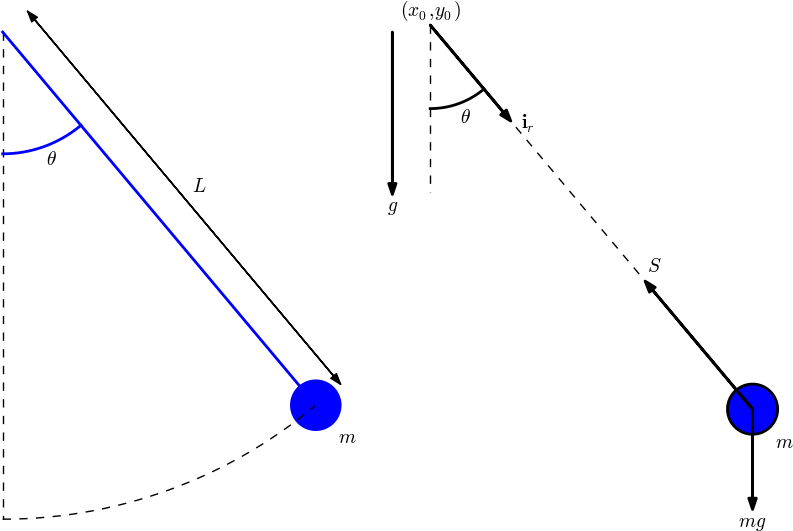
+# See pysketcher/examples/pendulum.py for code that produced the
|
|
|
+# pendulum figures.
|

 Hans Petter Langtangen
Hans Petter Langtangen
{kind=link}
{kind=link}
{kind=link}