|
|
@@ -1,8 +1,57 @@
|
|
|
## A language to describe a sketch
|
|
|
|
|
|
-Pysketcher initial version [HPL Pysketcher]() defines sketch in python.
|
|
|
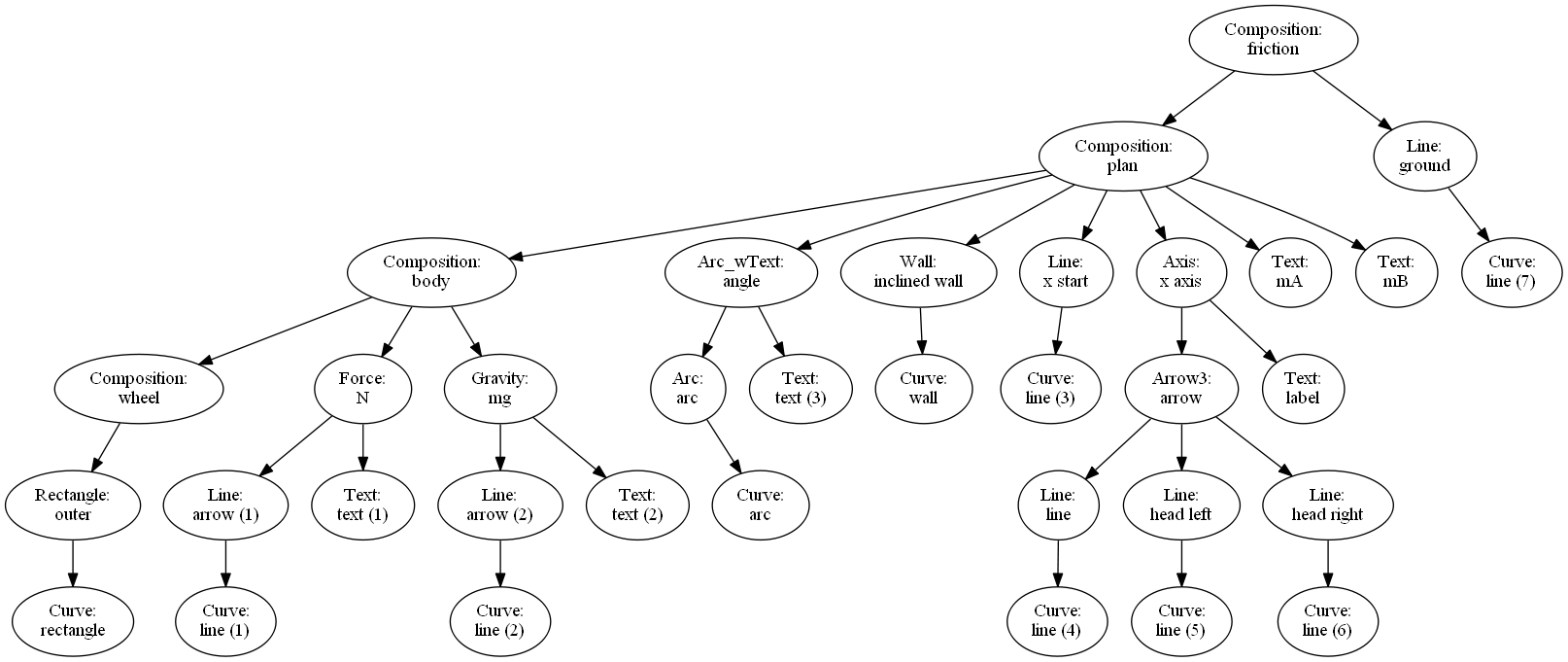
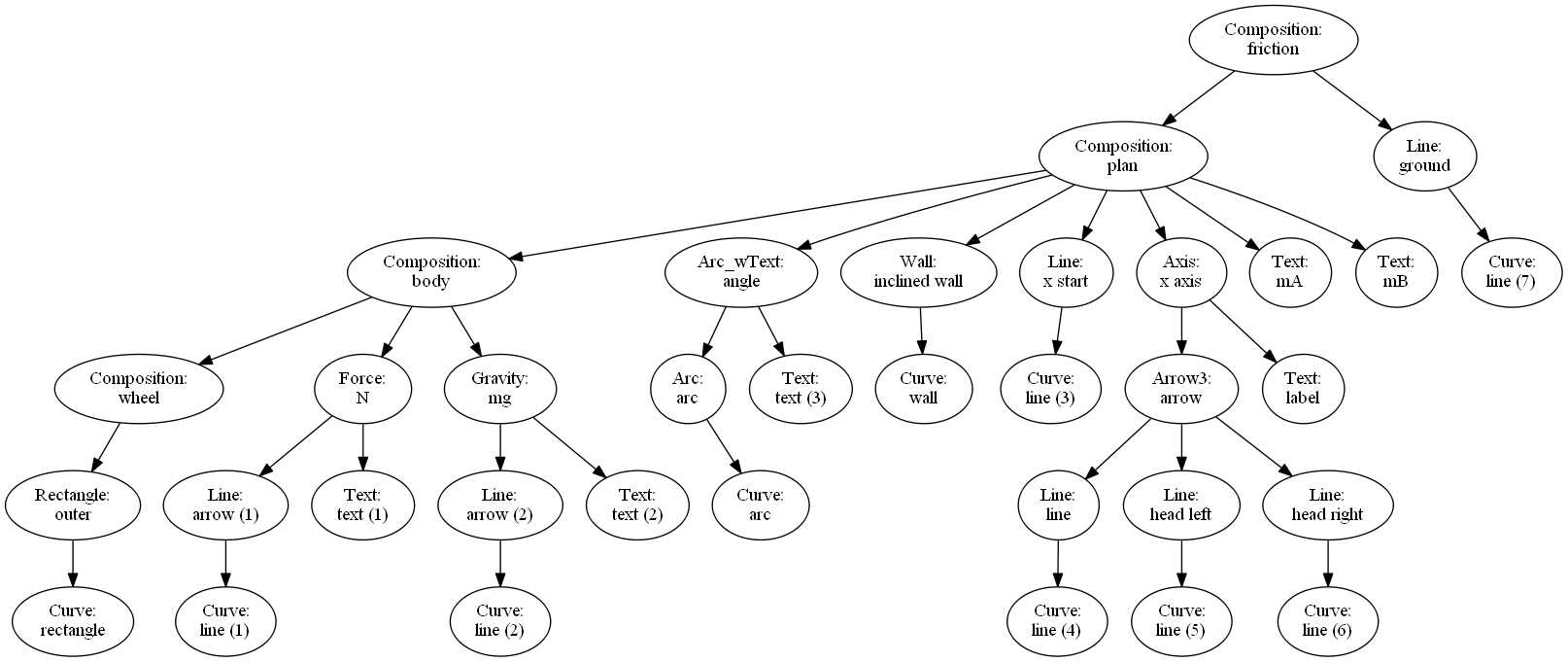
+Pysketcher initial version [HPL Pysketcher]() enable sketch definition in python. HPL is showing the hierachical nature of sketches. This is implemented via the Composition function. One can further grasp this using the graphviz_dot function applied to discover the composition herarchy implemented as a graphviz image [see The hierarchy of the "friction" main object](#the-hierarchy-of-the-friction-main-object) at the end of this page.
|
|
|
+
|
|
|
+Due to the hierarchical nature of sketches, it is quite straightforward to think about using yaml as the syntax for defining a sketch.
|
|
|
+
|
|
|
+The benefits are as follow:
|
|
|
+
|
|
|
+* A leaner presentation of the sketch as only the data making sense is going to be used
|
|
|
+* A more straightforward reading of the composition hierachy
|
|
|
+* A more robust sketch definition as only a set of rules will be applied to define a sketch and no further python idiom will be intermingled
|
|
|
|
|
|
## Example
|
|
|
+
|
|
|
+This example provides the yaml content to define the Dry Friction case
|
|
|
+
|
|
|
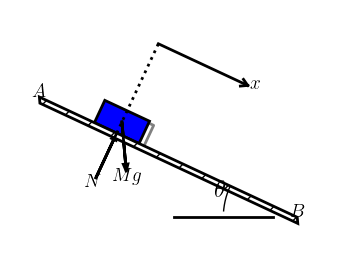
+### The final sketch
|
|
|
+
|
|
|
+
|
|
|
+An inclined plan (the A-B edge) supports a blue rectangle which is pulled donward by the gravity. The plan makes an angle $\theta$. The sketch design enable the $\theta$ angle to change. The whole plan including the body can rotate arround the point B.
|
|
|
+
|
|
|
+### The yaml definition
|
|
|
+
|
|
|
+Sketcher language is defined as a yaml compliant file or string. The yaml file is a dictionnary of
|
|
|
+
|
|
|
+* functionnal objects (leaf objects, like Rectangle, Circle, Line etc or composition)
|
|
|
+* extended with object style (line or fill colors, line stroke...)
|
|
|
+* to which transformation are applied (translation, rotation...)
|
|
|
+
|
|
|
+As a general rule, a new object suppose all parameters to be defined before they are used to construct it.
|
|
|
+
|
|
|
+**For example, you can create a circle if the center and the radius have been defined earlier in the file.**
|
|
|
+
|
|
|
+The general layout of a sketcher file is as follow:
|
|
|
+
|
|
|
+* **Libraries, Construction Variables, Frame**
|
|
|
+ * declaration of the libraries used by the objects further declared: at least pysketcher is mandatory
|
|
|
+ * various global variable which encompass the "Construction" variables which define the object main physical dimensions, positions...
|
|
|
+ * some "actions" corresponding to executable python sentences
|
|
|
+ * One mandatory action is the setting of the drawing frame (drawing_tool.set_coordinate_system): it must be declared before any other pysketcher object is used.
|
|
|
+ * Other use case of action is the setting of global parameters like default line color: (drawing_tool.set_linecolor('black')) for example
|
|
|
+* **Objects**
|
|
|
+ * Usually starting with the declaration of leaf simple objects
|
|
|
+ * then aggregated using the composition object
|
|
|
+ * Composition can be made of composition object
|
|
|
+ * grouping leafs and composition will be further used to apply transformation latter on (based on the "physics")
|
|
|
+ * The example presents three group of objects
|
|
|
+ * The body object
|
|
|
+ * The plan object
|
|
|
+ * The friction main object
|
|
|
+ * The plan includes the body
|
|
|
+ * The friction includes the plan (that will be able to rotate as a group) and the ground (will stay fixed)
|
|
|
+
|
|
|
+#### Libraries, Construction Variables, Frame
|
|
|
```yaml
|
|
|
libraries: ["from math import tan, radians, sin, cos",
|
|
|
"from pysketcher import *"]
|
|
|
@@ -28,6 +77,9 @@ x: a + 3*L/10.
|
|
|
y: help_line(x=x)
|
|
|
contact: point(x, y)
|
|
|
c: contact + rL/2*normal_vec
|
|
|
+```
|
|
|
+#### The body object
|
|
|
+```yaml
|
|
|
rectangle:
|
|
|
formula: Rectangle(contact, rl, rL)
|
|
|
style:
|
|
|
@@ -51,6 +103,9 @@ body:
|
|
|
formula: "Composition({'wheel': wheel, 'N': N, 'mg': mg})"
|
|
|
style:
|
|
|
linecolor: black
|
|
|
+```
|
|
|
+#### The plan object
|
|
|
+```yaml
|
|
|
mB:
|
|
|
formula: Text(r'$B$',B)
|
|
|
mA:
|
|
|
@@ -79,6 +134,14 @@ x_axis:
|
|
|
formula: "Axis(start=contact+ 2*rl*normal_vec, length=2*rl,label='$x$', rotation_angle=-theta)"
|
|
|
plan:
|
|
|
formula: "Composition({'body': body, 'angle': angle, 'inclined wall': wall, 'x start': x_const, 'x axis': x_axis, 'mA': mA, 'mB': mB})"
|
|
|
+```
|
|
|
+#### The friction main object
|
|
|
+```yaml
|
|
|
+
|
|
|
friction:
|
|
|
formula: "Composition({'plan': plan, 'ground': ground})"
|
|
|
-```
|
|
|
+```
|
|
|
+
|
|
|
+### The hierarchy of the "friction" main object
|
|
|
+
|
|
|
+
|


{kind=link}
{kind=link}
{kind=link}