sketcher.md 6.0 KB
A language to describe a sketch
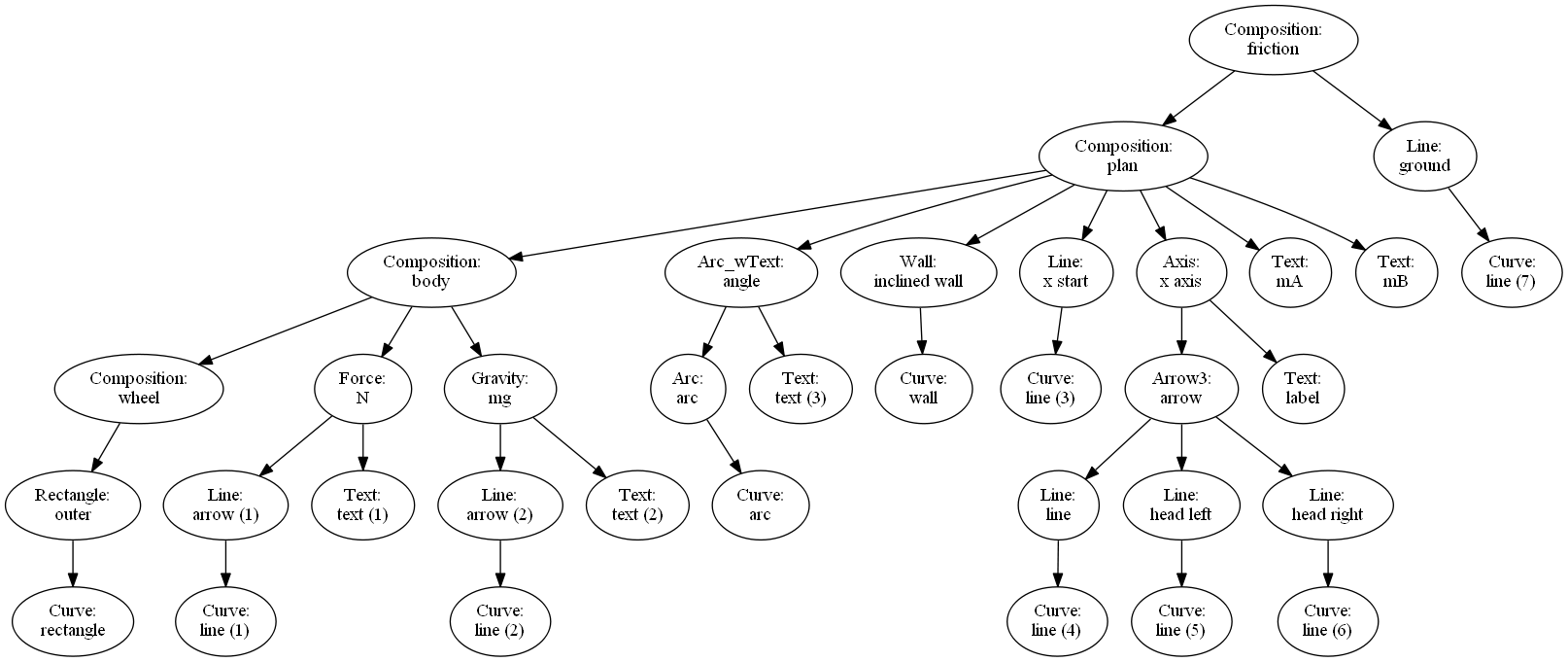
Pysketcher initial version [HPL Pysketcher]() enable sketch definition in python. HPL is showing the hierachical nature of sketches. This is implemented via the Composition function. One can further grasp this using the graphviz_dot function applied to discover the composition herarchy implemented as a graphviz image see The hierarchy of the "friction" main object at the end of this page.
Due to the hierarchical nature of sketches, it is quite straightforward to think about using yaml as the syntax for defining a sketch.
The benefits are as follow:
- A leaner presentation of the sketch as only the data making sense is going to be used
- A more straightforward reading of the composition hierachy
- A more robust sketch definition as only a set of rules will be applied to define a sketch and no further python idiom will be intermingled
Example
This example provides the yaml content to define the Dry Friction case
The final sketch
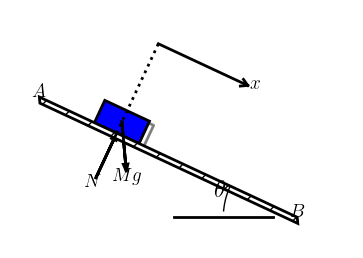
An inclined plan (the A-B edge) supports a blue rectangle which is pulled donward by the gravity. The plan makes an angle $\theta$. The sketch design enable the $\theta$ angle to change. The whole plan including the body can rotate arround the point B.
The yaml definition
Sketcher language is defined as a yaml compliant file or string. The yaml file is a dictionnary of
- functionnal objects (leaf objects, like Rectangle, Circle, Line etc or composition)
- extended with object style (line or fill colors, line stroke...)
- to which transformation are applied (translation, rotation...)
As a general rule, a new object suppose all parameters to be defined before they are used to construct it.
For example, you can create a circle if the center and the radius have been defined earlier in the file.
The general layout of a sketcher file is as follow:
- Libraries, Construction Variables, Frame
- declaration of the libraries used by the objects further declared: at least pysketcher is mandatory
- various global variable which encompass the "Construction" variables which define the object main physical dimensions, positions...
- some "actions" corresponding to executable python sentences
- One mandatory action is the setting of the drawing frame (drawing_tool.set_coordinate_system): it must be declared before any other pysketcher object is used.
- Other use case of action is the setting of global parameters like default line color: (drawing_tool.set_linecolor('black')) for example
- Objects
- Usually starting with the declaration of leaf simple objects
- then aggregated using the composition object
- Composition can be made of composition object
- grouping leafs and composition will be further used to apply transformation latter on (based on the "physics")
- The example presents three group of objects
- The body object
- The plan object
- The friction main object
- The plan includes the body
- The friction includes the plan (that will be able to rotate as a group) and the ground (will stay fixed)
Libraries, Construction Variables, Frame
libraries: ["from math import tan, radians, sin, cos",
"from pysketcher import *"]
fontsize: 18
g: 9.81 # constant gravity
theta: 30.0 # inclined plane angle
L: 10.0 # sketch sizing parameter
a: 1.0 #
xmin: 0.0 # sketech min Abscissa
ymin: -3.0 # sketech min Ordinate
rl: 2.0 # rectangle width
rL: 1.0 # rectangle length
setframe: # sketch setup
action: "drawing_tool.set_coordinate_system(xmin=xmin-L/5, xmax=xmin+1.5*L,ymin=ymin, ymax=ymin+1.5*L,instruction_file='tmp_mpl_friction.py')"
setblackline: # default frame values and actions
action: "drawing_tool.set_linecolor('black')"
B: point(a+L,0) # wall right end
A: point(a,tan(radians(theta))*L) # wall left end
normal_vec: point(sin(radians(theta)),cos(radians(theta))) # Vector normal to wall
tangent_vec: point(cos(radians(theta)),-sin(radians(theta))) # Vector tangent to wall
help_line: Line(A,B) # wall line
x: a + 3*L/10.
y: help_line(x=x)
contact: point(x, y)
c: contact + rL/2*normal_vec
The body object
rectangle:
formula: Rectangle(contact, rl, rL)
style:
linecolor: blue
filled_curves: blue
transform: ["rotate(-theta, contact)",
"translate(-rl/2*tangent_vec)"]
N:
formula: Force(contact - rl*normal_vec, contact, r'$N$', text_pos='start')
style:
linecolor: black
mg:
formula: Gravity(c, rl, text='$Mg$')
style:
linecolor: black
wheel:
formula: "Composition({'outer': rectangle})"
style:
shadow: 1
body:
formula: "Composition({'wheel': wheel, 'N': N, 'mg': mg})"
style:
linecolor: black
The plan object
mB:
formula: Text(r'$B$',B)
mA:
formula: Text(r'$A$', A)
wall:
formula: Wall(x=[A[0], B[0]], y=[A[1], B[1]], thickness=-0.25,transparent=False)
style:
linecolor: black
angle:
formula: "Arc_wText(r'$<bslash>theta$', center=B, radius=3, start_angle=180-theta, arc_angle=theta, fontsize=fontsize)"
style:
linecolor: black
linewidth: 1
ground:
formula: Line((B[0]-L/10., 0), (B[0]-L/2.,0))
stlye:
linecolor: black
linestyle: dashed
linewidth: 1
x_const:
formula: Line(contact, contact + point(0,4))
style:
linestyle: dotted
transform: rotate(-theta, contact)
x_axis:
formula: "Axis(start=contact+ 2*rl*normal_vec, length=2*rl,label='$x$', rotation_angle=-theta)"
plan:
formula: "Composition({'body': body, 'angle': angle, 'inclined wall': wall, 'x start': x_const, 'x axis': x_axis, 'mA': mA, 'mB': mB})"
The friction main object
friction:
formula: "Composition({'plan': plan, 'ground': ground})"
The hierarchy of the "friction" main object